
Finish Line Cameras

Earlier today I was watching the live feed of one of speed skating’s regular “world cup” events – one of a series of races held throughout the skating season in which points are awarded for various positions (100 for first, 80 for second, 70 for third, etc.) and in which most of the world’s elite speed skaters participate to earn points, cash prizes, and television exposure for sponsors. The final event of today’s racing was the Men’s 1000m event, which has turned into a very closely-contested affair between Dutch skater Kjeld Nuis, and Russian skater Pavel Kuliznikov (Павел Кулижников).
Yesterday, the pair had contested the distance with Nuis winning by a small margin and today they were paired together (the pairings are determined by world cup point rankings). In what was essentially the final race of the day, they raced neck and neck to finish with… the same time. Or at least that’s what we saw on the TV.
The interested reader should consult my previous article on timing equipment, which was inspired by the 0.003 margin of victory in the men’s 1500m race at the Winter Olympic Games in Sochi last year.
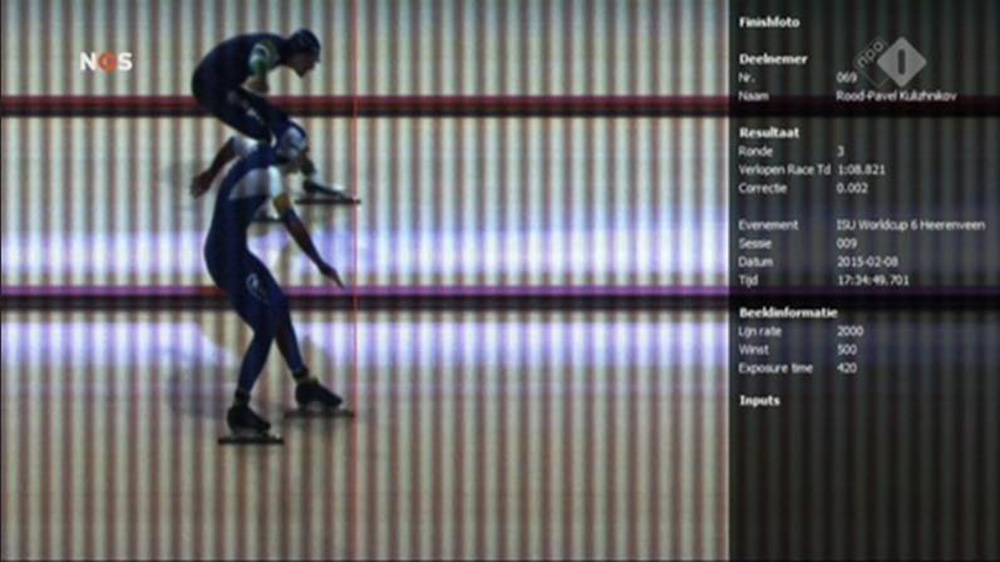
The essential point is this – in a “proper” ISU competition, there must be three independent timing systems at work. In this case they are the transponders (visible on the skater’s ankles in the picture above), the “beam” which is just a photocell that detects when a light beam has been broken (visible as those boxes on the ice in the picture above), and the “lynx” photo finish camera, whose functionality I describe in painul detail in my previous article about timing equipment.
Not long after crossing the finish line, the times were “corrected”. The initial times are taken with the beam, and the final time verified with the photo finish camera which is by far the most accurate and reliable of the three systems. Kjeld’s time was corrected to 1:08.81 while Pavel’s remained at 1:08.82. All would have been well, except that the Dutch TV broadcaster “NOS” has a TV camera set up next to the finish line, and it showed the photo above, which clearly shows Pavel slightly ahead of Kjeld.
This has caused much confusion, with screenshots of the TV coverage being posted all over social media. To their credit, the race organisers also released a picture from the photo finish camera, which I have included here:
In this photo, it can be clearly seen that Kjeld is ahead of Pavel. (Kjeld’s time is 1:08.819, and Pavel’s is 1:08.821)
This seems to have only added to the confusion. How is it possible that two different cameras can show a different result?
To understand this, we need to examine how each of these cameras works. The photo finish camera sees the world through a narrow slit (no asian jokes, please) and that slit perfectly covers the finish line. Being as it is, designed to very accurately determine a skater’s finishing time, it can take pictures at 2000 frames per second – this is an important detail. A TV camera, on the other hand, sees the world as a 2-dimensional plane, which is convenient since TV images are also 2-dimensional. A TV broadcast is limited by the frame rate of standard televisions, which is typically 25 frames per second (PAL, 30 for NTSC (actually 29.97)).
During special events, such as the Olympic Games, special cameras are often brought in which can shoot at very high framerates (this is where you get those very smooth slow-motion shots from). These cameras also sometimes make appearances at world cup races, but because of space limitations, the camera which is set up to point at the finish line is a small, and relatively lower-performing piece of hardware.
So, while the photo finish camera only has to look at a thin line of pixels and “sample” those pixels 2000 times a second, a TV camera has an entirely different challenge of sampling a 2-dimensional plane of pixels at some unspecified framerate but ultimately destined for a broadcast at 25 frames per second. HD resolution, for example is 1920×1080 which comes to just over 2 million pixels. Not surprisingly, even the very best HD cameras can only go up to 240 frames per second (which is more than enough for very smooth slow-motion). However, as you can see from the photo finish image, the margin was two thousandths of a second, which would be indistinguishable if you only had 240 frames per second.
But what about that image?
So to understand why the TV image looks the way it does, giving the appearance of Kjeld finishing behind Pavel, one needs to understand something called the “rolling shutter effect”. The name comes about because in the days of analog cameras, shutters used to actually roll. Film camera shutters used to rotate, and standard movies are projected at 24 frames per second, so you would typically set your camera to “180 degree shutter” which meant that for every 360 degree rotation of the shutter, the aperture would be open for half of it, giving you an exposure of 1/48 of a second.
Think about it for a second. In the blink of an eye, the rotating shutter flashes past and exposes the film. This means that not all of the film is exposed at the same time, even though it is exposed for the same amount of time (which is what exposure really means). Surprisingly enough, pretty much exactly the same thing happens with digital cameras. Not all of the pixels on an image sensor are “read” at exactly the same time. Typically, the pixels at the top are read slightly before the pixels at the bottom. This difference is probably not more than a hundredth of a second, but in certain situations, that can make a difference. For example, helicopter blades:

The electronics in the image sensor “read” the amount of light coming in at each individual pixel (that’s how they form an image), and they start at the top. As the “reading” goes down, things which are moving fast enough will move slightly, and by the time you get to the bottom of the image, those things may have moved significantly enough for you to see the difference. In the example with the helicopter blades, the individual rotor blades are obviously (and verifiably) straight, but they can seem to be curved because of the rolling shutter effect.
What has happened in the TV image of Kjeld and Pavel is that the camera has “read” the top part of the image sensor first, when Kjeld had not yet crossed the line, and by the time it got to the bottom, Pavel’s skate was just touching it. At that point, Kjeld’s skate was probably comfortably on top of the line, but we won’t see that until the next frame is sampled. None of the lines seem to be curved like the helicopter blade, because the skaters are the only ones who are moving. Sadly for Pavel, the appearance that he is ahead of Kjeld is artifical and simply the result of a quirk in imaging technology. The image from the photo finish camera, with its narrow field of view and higher frame rate is by far the more trustworthy of the two.
(of course, if you read my article on timing equipment, you’ll know that I actually think that in these instances, the result should be considered a tie.)
Finally, here’s a video from the slow-mo guys with some great footage of how a camera shutter works which should help you visualise what’s going on, and why we get the rolling shutter effect.
Nice article. Have a look at the Phantom HD Gold, I think you’ll be impressed (1080p @ 1000FPS). http://www.visionresearch.com/Phantom-HD-GOLD/